Systèmes de 1er ordre#
Modélisation#
Equation Différentielle#
Un système LTI peut être décrit par une équation différentielle de liant l’entrée \(e(t)\) et la sortie \(s(t)\). Pour les systèmes passe-bas d’ordre 1, cette équation différentielle est donnée par:
\(K\) : gain statique,
\(\tau\) : constante de temps (s).
Fonction de Transfert#
Pour faciliter l’analyse des systèmes LTI, il est courant de recourir à la notion de fonction de transfert. En utilisant les propriétés de la transformée de Laplace, il est possible d’établir que la fonction de transfert d’un système LP d’ordre 1 est donnée par:
Cette fonction de transfert possède:
un unique pôle négatif en \(p=-\frac{1}{\tau}\),
aucun zéro.
Réponse indicielle#
La réponse indicielle correspond à la réponse du système lorsque l’entrée est un échelon c-à-d
Pour le cas d’un système LP d’ordre 1, la réponse indicielle est donnée par :
Exemple#
La figure suivante présente l’allure de la réponse indicielle à un échelon d’amplitude :math:E. Cette réponse suit une exponentielle croissante et se stabilise vers une valeur finie.
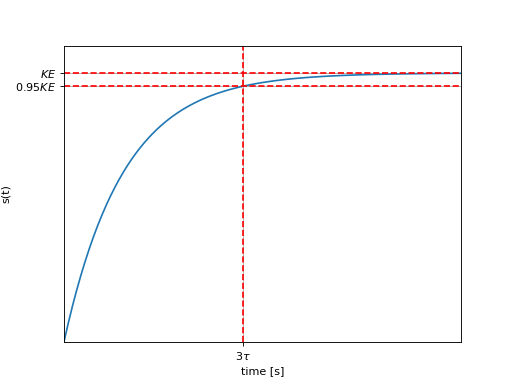
Propriétés#
Valeur initiale : \(s(0)=0\),
Valeur finale : \(s(\infty)=KE\),
Temps de réponse à \(\pm 5\%\) : \(s(t_r)=0.95s(\infty)\) avec \(t_r\approx 3\tau\) s,
Pas de dépassement : \(s(\infty)=\max(s(t))=KE\).
Identification#
L’identification graphique des paramètres peut s’obtenir de la manière suivante:
Gain statique: le gain statique s’obtient à partir de la valeur finale via la relation \(K = s(\infty)/E\).
Constante de temps: la constante de temps peut s’obtenir à partir du temps de réponse via la relation \(t_r = 3\tau\).
Réponse Fréquentielle#
La réponse fréquentielle s’obtient en posant \(p=j\omega\) où \(\omega\) désigne la pulsation (en rad/s). La réponse fréquentielle d’un système LP de premier ordre est donnée par :
La réponse fréquentielle est une fonction \(\mathbb{R} \to \mathbb{C}\). Pour représenter cette réponse, il est courant de recourir à la représentation du module et de l’argument en fonction de \(\omega\).
Module#
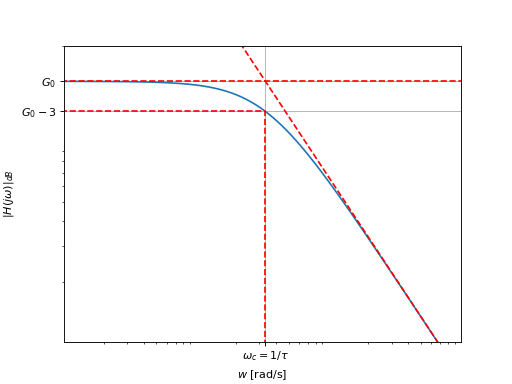
Le module s’exprime sous la forme
Amplification basse-fréquence : \(\lim_{\omega\to 0}|H(j\omega)|=|K|\),
Amplification haute-fréquence : \(\lim_{\omega\to \infty}|H(j\omega)|=0\).
Pulsation de coupure à -3dB : \(|H(j\omega_c)|=|K|/\sqrt{2}\) pour \(\omega_c=\frac{1}{\tau}\) rad/s.
Comportement asymptotique : Pour \(\omega \gg \omega_c\), \(|H(j\omega)|\approx K \left(\frac{\omega}{\omega_c}\right)^{-1}\) (pente de -1)
Argument#
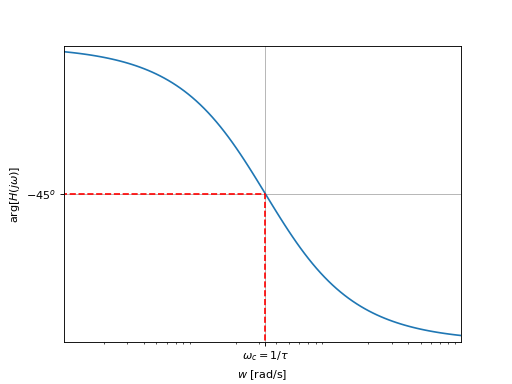
Pour \(K>0\), l’argument s’exprime sous la forme :
Nous obtenons alors les propriétés suivantes :
Déphasage basse-fréquences : \(\lim_{\omega\to 0}\arg[H(j\omega)]=0\),
Déphasage haute-fréquences : \(\lim_{\omega\to \infty}\arg[H(j\omega)]=-90^o\).
Déphasage à la pulsation de coupure à -3dB : \(\arg[H(j\omega_c)]=-45^o\).
Identification#
L’identification graphique des paramètres s’obtient de la manière suivante:
Gain statique: le gain statique correspond à la valeur du module en basse-fréquence. Si le module est affiché en dB, la valeur du module s’obtient via l’expression \(K = 10^{G_0/20}\). Attention à bien vérifier que la phase évolue de \(0\) à \(-90^o\). Si ca n’est pas le cas, le gain est négatif.
Constante de temps: la constante de temps s’obtient à partir de la lecture de la pulsation de coupure via l’expression \(\omega_c = 1/\tau\).