Liste des correcteurs#
Contexte#
Considérons un système en boucle fermée avec un retour unitaire

Boucle Fermée avec Retour Unitaire#
\(E(p)\): Transformée de Laplace de la consigne,
\(C(p)\): Fonction de transfert du correcteur,
\(F(p)\): Fonction de transfert du système + capteur,
\(C(p)F(p)\): Fonction de transfert en boucle ouverte (FTBO).
Correcteurs Usuels#
Pour respecter les contraintes du cahier des charges, nous pouvons utiliser différents types de correcteurs \(C(p)\). Ces correcteurs possèdent un ou plusieurs paramètres de liberté que nous pouvons ajuster en fonction des performances souhaitées.
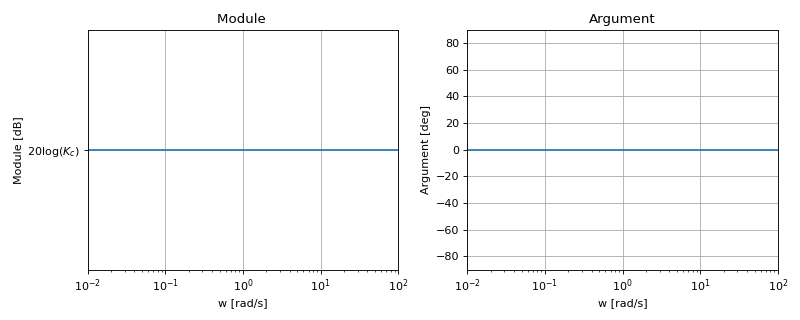
Proportionnel#
La fonction de transfert du correcteur P est donnée par:
Paramètre du correcteur: \(K_c\)
Réponse fréquentielle :
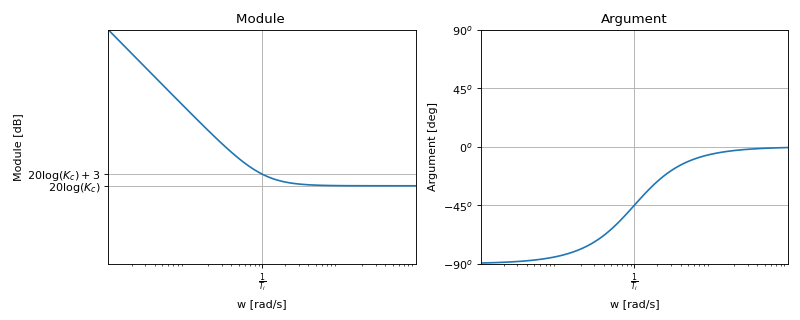
Proportionnel Intégral#
La fonction de transfert du correcteur PI est donnée par:
Paramètres du correcteur: \(K_c\), \(T_i\)
Réponse fréquentielle :
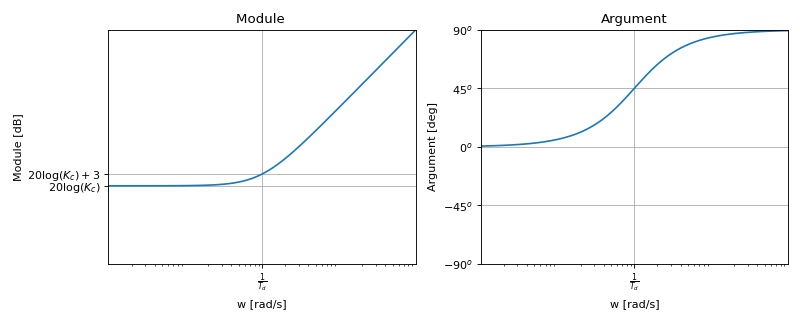
Proportionnel Dérivé#
La fonction de transfert du correcteur PD est donnée par:
Paramètres du correcteur: \(K_c\), \(T_d\)
Réponse fréquentielle :
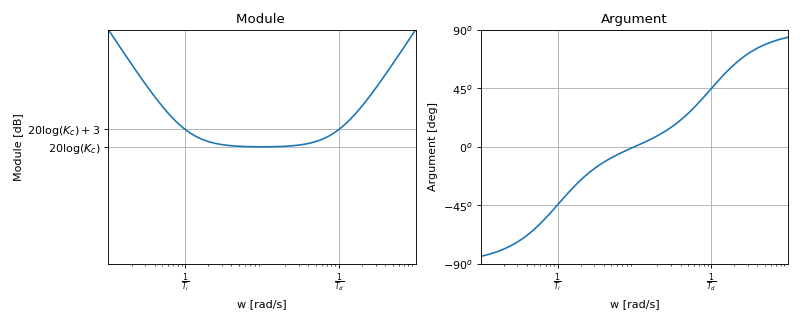
Proportionnel Intégral Dérivé#
La fonction de transfert du correcteur PID est donnée par:
Paramètres du correcteur: \(K_c\), \(T_i\), \(T_d\)
Réponse fréquentielle :