Systèmes de Second Ordre#
Modélisation#
Equation différentielle#
\(\omega_0\) désigne la pulsation propre [rad/s],
\(m\) le coefficient d’amortissement.
Fonction de transfert#
La fonction de transfert d’un système de second ordre peut s’exprimer sous la forme normalisée suivante :
\(N(p)\) désigne le numérateur de la fonction de transfert (polynôme de degré inférieur ou égale à 2).
Exemples#
Expressions des Pôles#
Les pôles s’obtiennent en déterminant les racines du dénominateur de la fonction de transfert c-a-d en déterminant les valeurs de \(p\) telles que :
Cette équation est une équation du second degré. Le discriminant s’exprime sous la forme suivante:
L’expression du discriminant montre que la valeur de m joue un rôle essentiel dans l’expression des deux racines. Nous pouvons distinguer 3 cas de figure.
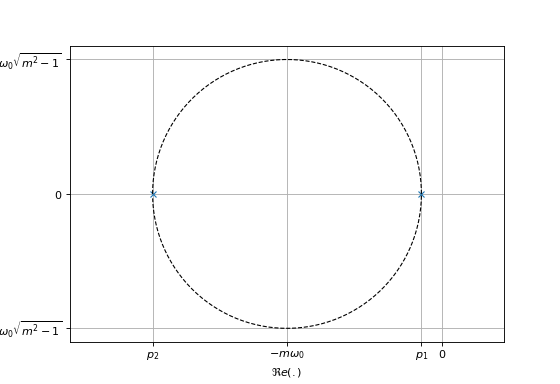
Cas où m>1#
Lorsque \(m>1\), le système possède deux poles réels et distincts. Les pôles s’expriment sous la forme
Mathématiquement, nous obtenons les propriétés suivantes:
le produit des deux pôles est égale à \(p_1p_2=m^2\omega_0^2-\omega_0^2(m^2-1)=\omega_0^2\)
la somme des deux pôle est égale à \(p_1+p_2=-2m\omega_0\).
Nous en déduisons alors que:
Géométriquement, les deux pôles sont placés sur un cercle de centre \(-m\omega_0\) et de rayon \(\omega_0\sqrt{m^2-1}\).
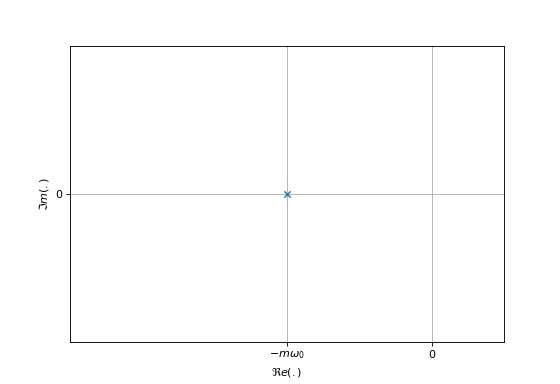
Cas où m=1#
Lorsque \(m=1\), le système possède un pole réel double. Le pole réel double s’exprime sous la forme
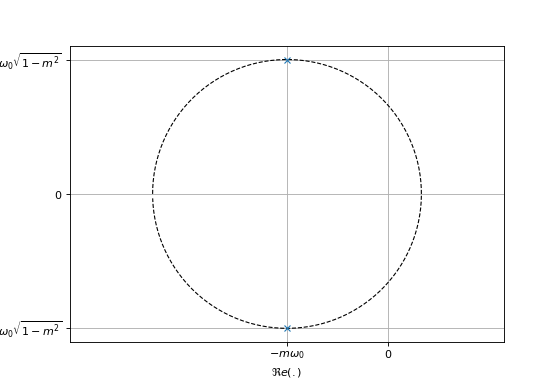
Cas où m<1#
Lorsque \(m<1\), le système possède une paire de pôles complex-conjugués. Les pôles s’expriment sous la forme
Mathématiquement,
le module de chaque pôle est égal à \(|p_1|=|p_2|=\sqrt{(m\omega_0)^2+\omega_0^2(1-m^2)}=\omega_0\).
l’angle formé entre le pôle \(p_1\) et l’axe des réels est donné par \(\cos(\theta)=-\Re e(p_1)/|p_1|=m\)
Nous en déduisons alors que:
Réponse Temporelle#
La réponse à une entrée quelconque s’exprime sous la forme :
\(s_l(t)\): solution libre,
\(s_p(t)\): solution particulière.
Cas où m>1#
Le régime libre s’exprime sous la forme :
Le régime libre est donné par la contribution de deux systèmes de premier ordre ayant pour constantes de temps respectives:
Cas où m<1#
Le régime libre s’exprime alors sous la forme :
\(-m\omega_0`\) régit la vitesse de décroissance de l’enveloppe,
\(\omega_p=\omega_0 \sqrt{1-m^2}\) correspond à la pseudo-pulsation des oscillations [rad/s]
Propriétés#
Oscillations : pseudo-pulsation et pseudo-période.
Ratio des amplitudes après une oscillation :
Lorsque \(m\ll 1\), \(\omega_p\approx \omega_0\) et \(R\approx e^{2\pi m}\).
Réponse Indicielle#
Comportement à la discontinuité : Pour les signaux ne présentant pas de singularité au voisinage de 0, il est possible d’établir que (voir démonstration) :
Regime permanent : Lorsque l’entrée est un échelon, la sortie en régime permanent s’exprime sous la forme
Formes Normalisées#
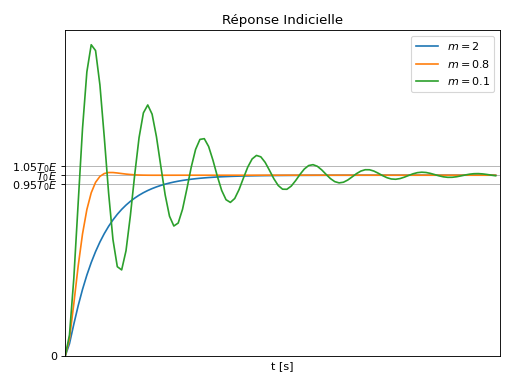
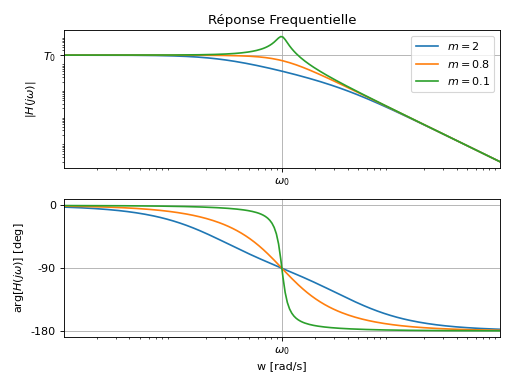
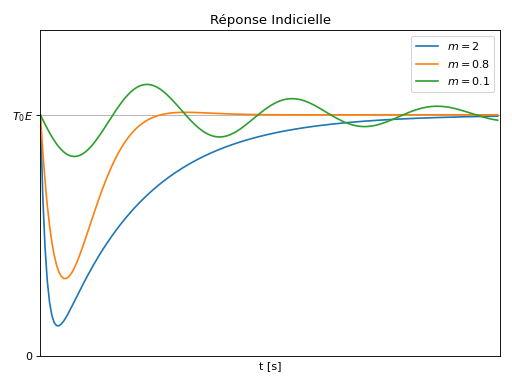
Passe-bas (LP)#
gain statique: \(T_0\),
pulsation propre: \(\omega_0\) (rad/s),
coefficient d’amortissement: \(m\).
Réponse Indicielle
Comportement Fréquentiel
Valeur à la pulsation propre: \(H(j\omega_0)=\frac{T_0}{2jm}\),
Si \(m<0.7\), présence d’une résonance à la pulsation \(\omega_r=\omega_0\sqrt{1-2m^2}\) [rad/s]
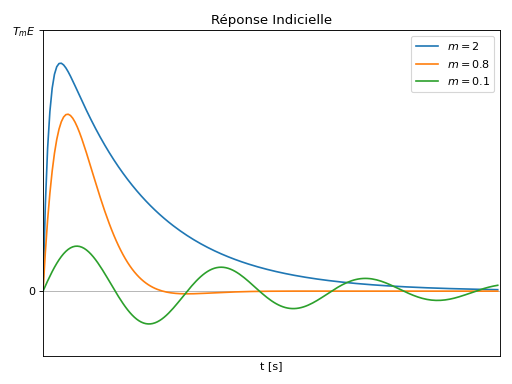
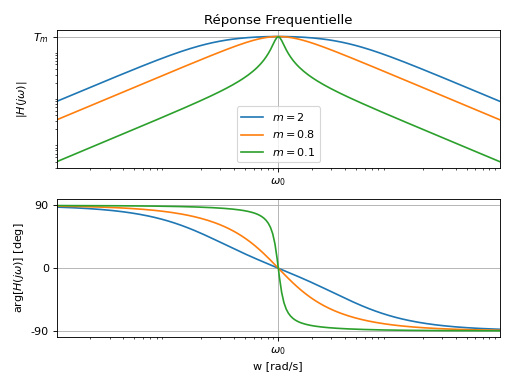
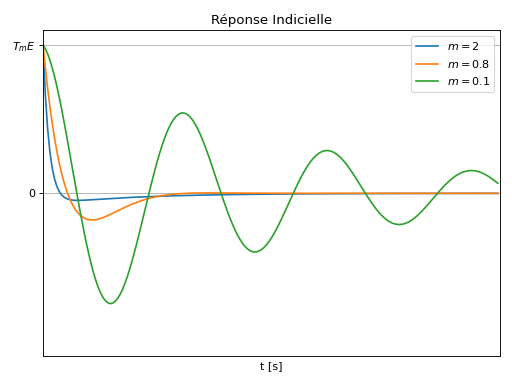
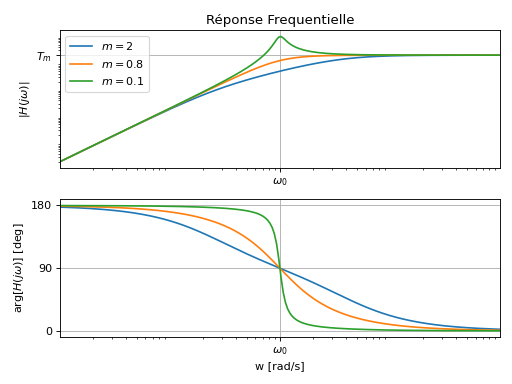
Passe-bande (BP)#
gain maximum: \(T_m\),
pulsation propre: \(\omega_0\) (rad/s),
coefficient d’amortissement: \(m\).
Réponse Indicielle
Comportement Fréquentiel
Valeur à la pulsation propre: \(H(j\omega_0)=T_m\),
Intersection des asymptotes de module: \(T_i=2m T_m\),
Largeur de la bande passante à -3dB: \(\Delta \omega =2m \omega_0\) [rad/s].
Passe-haut (HP)#
gain haute-fréquence: \(T_{\infty}\),
pulsation propre: \(\omega_0\) (rad/s),
coefficient d’amortissement: \(m\).
Réponse Indicielle
Comportement Fréquentiel
Valeur à la pulsation propre: \(H(j\omega_0)=j\frac{T_{\infty}}{2m}\),
Si \(m<0.7\), présence d’une résonance à la pulsation \(\omega_r=\omega_0/\sqrt{1-2m^2}\) [rad/s]
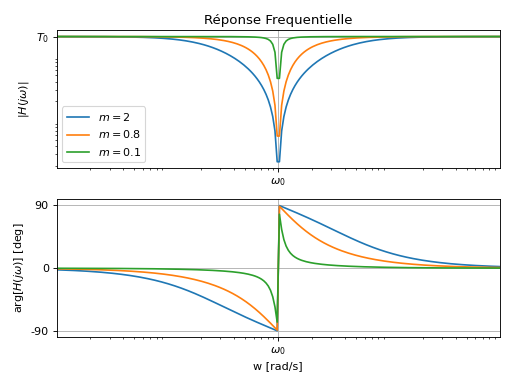
Rejecteur (Notch)#
gain maximum: \(T_0\),
pulsation propre: \(\omega_0\) (rad/s),
coefficient d’amortissement: \(m\).
Réponse Indicielle
Comportement Fréquentiel
Valeur à la pulsation propre: \(H(j\omega_0)=0\),
Largeur de la bande rejetée à -3dB: \(\Delta \omega =2m \omega_0\) [rad/s].