Expression de la valeur initiale#
Introduction#
Lorsqu’un système est excité par une entrée \(e(t)\) en \(t=0^+\), la sortie \(s(t)\) peut présenter différents comportements. Ces différents comportements permettent d’identifier le type de filtre (passe-bas, passe-haut, etc) et certains paramètres.
Dans ce tutorial, nous nous intéressons spécifiquement au comportement à l’excitation, c-à-d en \(t=0^+\).
Pour analyser le comportement en \(t=0^+\), ce tutorial présente une solution basée sur l’équation différentielle. Pour des raisons de simplicité, les approches présentées ci dessous se limitent au cas des systèmes de second ordre.
Approche Temporelle#
Considérons un système de second ordre décrit par l’équation différentielle suivante
Dans les développements qui suivent nous allons considérer que les signaux d’entrée et de sortie n’a pas de comportement “singulier” ou infini en 0. Mathématiquement, cela implique que :
Note
Remarquons que la méthodologie décrite ci dessous ne permet pas d’obtenir la réponse implulsionnelle pour laquelle \(e(t)=\delta(t)\).
Valeur Initiale#
Il est possible de trouver la valeur initiale en \(t=0^+\) en intégrant plusieurs fois l’équation différentielle par rapport à \(t\), et en évaluant le résultat entre \(0^-\) et \(0^+\).
Intégration Simple#
En intégrant une fois l’équation différentielle entre \(0^-\) et \(0^+\), nous obtenons :
En supposant que l’entrée et la sortie ne contiennent pas d’impulsion, nous trouvons :
et donc :
Intégrations successives#
En intégrant deux fois l’équation différentielle entre \(0^-\) et \(0^+\), nous obtenons :
En supposant que l’entrée et la sortie ne contiennent pas d’impulsion, les deux derniers termes des deux membres sont nuls. Dans ce contexte, l’égalité se simplifie sous la forme :
et donc :
Modélisation matricielle#
Ces relations permettent de définir un système d’équation. Pour simplifier la résolution du système, il est possible d’utiliser une notation matricielle. Définissons tout d’abord les vecteurs suivants :
ainsi que les vecteurs de “variation”
En exploitant ces notations et les équations (1) et (2), nous obtenons le système
En utilisant le fait que
le vecteur \(\Delta\mathbf{s}(0)\) peut s’exprimer sous la forme
Nous obtenons finalement
Exemples#
Dans cette partie, nous nous intéressons aux comportements des filtres de second ordre de type passe-bas, passe-bande, passe-haut et rejecteur. les
Pour ces filtres, nous obtenons la relation générale :
Propriétés#
Passe-bas :
Passe-bande :
Passe-haut :
Rejecteur :
Illustrations#
Considérons le cas où l’entrée est un échelon d’amplitude \(E=1\). Dans ce contexte, le vecteur d’entrée est égale à
La figure suivante présente la réponse indicielle pour un filtre passe-bas, passe-bande, passe-haut et rejecteur ayant la même pulsation propre \(\omega_0=1\) rad/s, le même coefficient d’amortissement \(m=0.5\) et le même coefficient d’amplification \(T_0=T_\infty=T_m=2\).
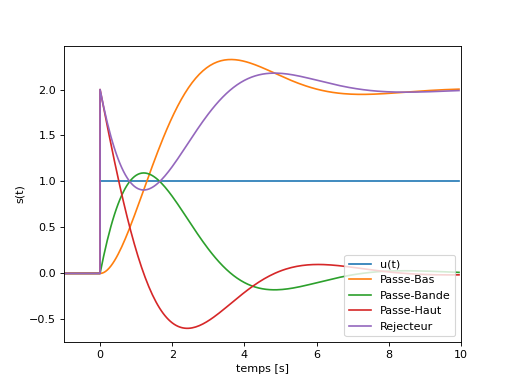
Nous observons rapidement que :
Seuls les filtres passe-haut et rejecteur laissent passer les discontinuités en entrée.
Seuls les filtres passe-bas et rejecteur possèdent un regime permanent non nul.