Systèmes de Premier Ordre#
Modélisation#
Equation différentielle#
\(\tau\) désigne la constante de temps [s].
Fonction de transfert#
La fonction de transfert d’un système de premier ordre peut s’exprimer sous la forme normalisée suivante :
\(N(p)\) désigne le numérateur de la fonction de transfert (polynôme de degré inférieur ou égale à 1).
\(\omega_c=\frac{1}{\tau}\) désigne la pulsation de coupure à -3dB [rad/s].
Expression du pôle#
Un système de premier ordre possède un unique pôle. Ce pôle s’obtient en cherchant l’unique racine du dénominateur de la fonction de transfert.
Exemples#
Réponse Temporelle#
La solution complète de l’équation différentielle s’exprime sous la forme :
\(s_l(t)\): solution libre (régime libre)
\(s_p(t)\): solution particulière (régime forcé). L’expression du régime forcé dépend de l’allure de l’entrée et des coefficients \(b_1\) et \(b_2\)
Exemple (LP)#
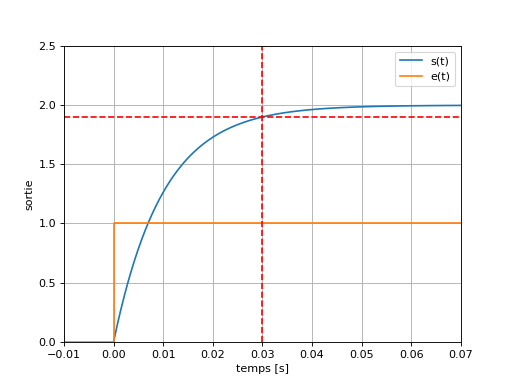
Considérons la réponse d’un système de premier ordre a un échelon d’amplitude \(E\), c-à-d \(e(t)=Eu(t)\). Le système est supposé initialement au repos (\(s(0^-)=0\)). Comme l’entrée est un échelon, le regime forcé est de la forme \(s_p(t)=Su(t)\). En remplaçant cette expression dans l’équation différentielle pour \(t\ge 0\), nous obtenons \(s_p(t)=T_0E\). Il en vient que :
La constante d’intégration s’obtient en déterminant une condition initiale. En intégrant l’équation différentielle entre \(t=0^-\) et \(t=0^+\), nous obtenons \(s(0^+) = 0\) En exploitant cette equation, il en vient que :
Pour un filtre passe-bas de premier ordre, la réponse du système a un échelon d’amplitude \(E\) s’exprime finalement sous la forme :
Valeurs Remarquables#
Valeur initiale : \(s(0^+)=0\),
Valeur finale : \(s(\infty)=T_0 E\),
Valeur maximale: \(\max(s(t))=T_0 E\),
Temps de réponse à \(\pm 5\%\): \(t_r=3\tau\).
Réponse Fréquentielle#
La réponse fréquentielle s’obtient en posant \(p=j\omega\) dans l’expression de la fonction de transfert. Nous obtenons :
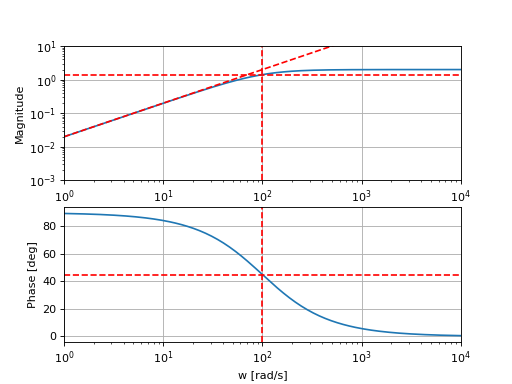
Passe-Bas#
Module :
Argument :
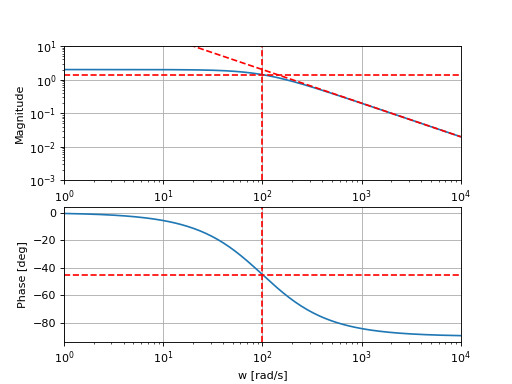
Passe-Haut#
Module :
Argument :