Fonction de Transfert en BF#
Objectif#
Dans ce tutorial, nous montrons comment utiliser l’expression de la FTBF pour régler un correcteur proportionnel.

Boucle Fermée#
La fonction de transfert est égale à :
La période d’échantillonnage est fixée à \(T_e=0.1\) s. L’objectif est de calibrer un correcteur proportionnel (c-a-d \(C(z)=K\)) de sorte à obtenir un gain statique en boucle fermée de 0.8
Méthodologie#
Pour calibrer la valeur de \(K\), nous allons procéder en trois temps:
Calcul de la fonction de transfert en boucle fermée (FTBF),
Calcul du gain statique de la boucle fermée,
Calibration de K.
FTBF#
Pour calculer la FTBF, nous allons utiliser la formule (à connaître):
\(A(z)\): Fonction de transfert de la chaîne directe,
\(B(z)\): Fonction de transfert de la chaîne de retour.
Dans notre problème, nous avons \(A(z)=K \times F(z)\) et \(B(z)=1\). La FTBF s’exprime alors sous la forme :
Après simplification, nous obtenons :
Gain statique#
Comme le système est un système à temps discret, le gain statique \(G\) est donné par \(FTBF(1)\). Il en vient que
Calibration#
Pour obtenir un gain statique de 0.8, il faut poser l’égalité:
Nous obtenons :
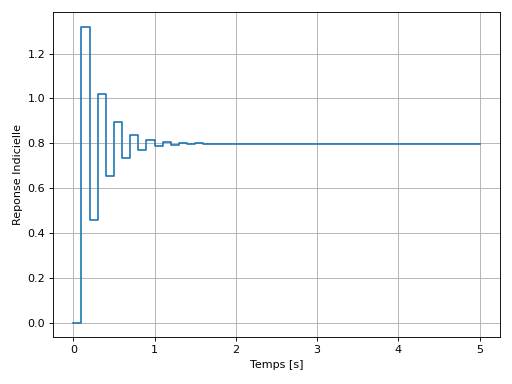
Vérification#
En asservissement, il est toujours utilise de vérifier le résultat avec une simulation. En utilisant Python, nous obtenons la réponse indicielle suivante.
from control import tf, feedback, step_response
import matplotlib.pyplot as plt
Te = 0.1
K = 60
Fz = tf([0.022], [1, -0.666], Te)
Az = K*Fz
FTBFz = feedback(Az, 1)
T, yout = step_response(FTBFz)
plt.step(T, yout, where="post")
plt.xlabel("Temps [s]")
plt.ylabel("Reponse Indicielle")
plt.grid()
plt.tight_layout()